A shortcoming of a single sensor camera is lack of depth perception.Two objects, at different depths may appear at the same distance in a 2D image.
One solution is to add LiDAR to the setup. LiDAR (Light Detection and Ranging) has found use in applications from autonomous vehicles to robot vacuum cleaners.
LiDARs widespread usage in commercial products has driven down the cost.This 2D LiDAR is available form Slamtec for $99.
Before you start thinking Slamtec sounds a bit sketchy for a company name, you should know SLAM stands for Simultaneous Localization and Mapping – the primary application for this $99 unit. But what about depth scanning for use with a camera?
Our application only requires depth mapping along the centerline of the image.The depth of other objects in the image can be inferred from that measurement. In this case, the depth information isn’t needed for absolute measurement, but rather to resolve the ambiguity of the 2D image.
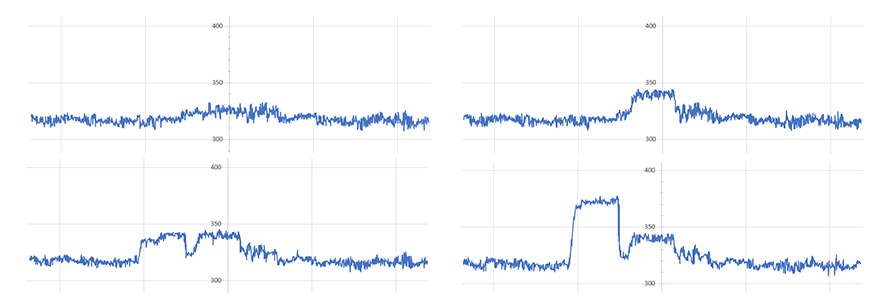
In the scans below, the LiDAR was mounted 56 inches above the work platform.Targets measuring 4 inches wide by .7 inches thick were placed in the scan path.They are clearly visible in the scans.
Upper Left: Empty Platform
Upper Right: Single Target
Lower Left: 2 Targets 1 Inch Apart
Lower Right: Multiple Targets Stacked.
LiDAR Scans
CONCLUSION
After only a couple days of hands on experience with this LiDAR unit, we’re impressed with the results.Combined with a single board computer, open source drivers and a little Python code, we can now determine the location of objects in 3D space, and we’ve just scratched the surface.
And who doesn’t like spinning ‘lasers’?
Computer Vision and Machine Learning have never been more accessible to small businesses.If you’re considering a computer vision project for your business, we’d love to hear about it.Maybe we can design something incredible together.
Russ Husky
russ.husky@cccom.com