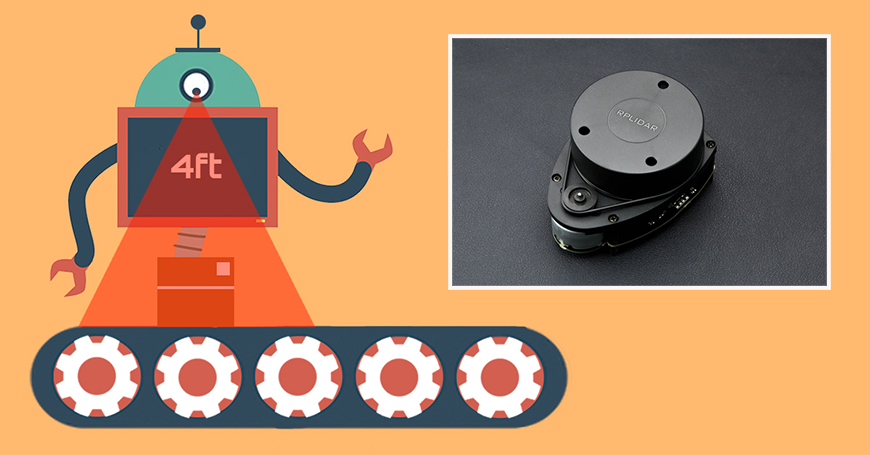
A shortcoming of a single sensor camera is lack of depth perception.Two objects, at different depths may appear at the same distance in a 2D image. One solution is to add LiDAR to the setup. LiDAR (Light Detection and Ranging) has found use in applications from autonomous vehicles to robot vacuum cleaners. LiDARs widespread usage […]
Category Archives: Computer Vision
23
Jun
Jun
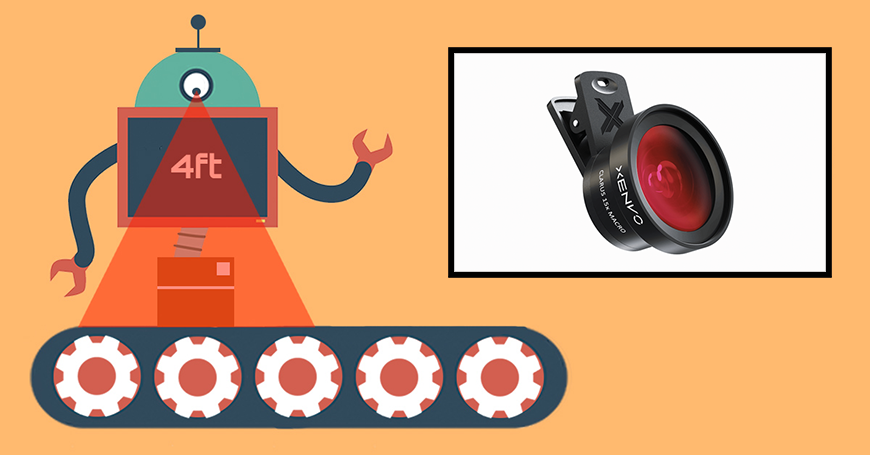
In an earlier post Low-Cost Mobile Phone Lenses Compared, I compared the $40 Xenvo Pro Lens to the $100 SANDMARC WIDE ANGLE lens. At 2.5 times the cost of the Xenvo, the SANDMARC had significantly less distortion in the raw image. This is a fair evaluation if you plan to use the Xenvo Pro for […]
16
Jun
Jun
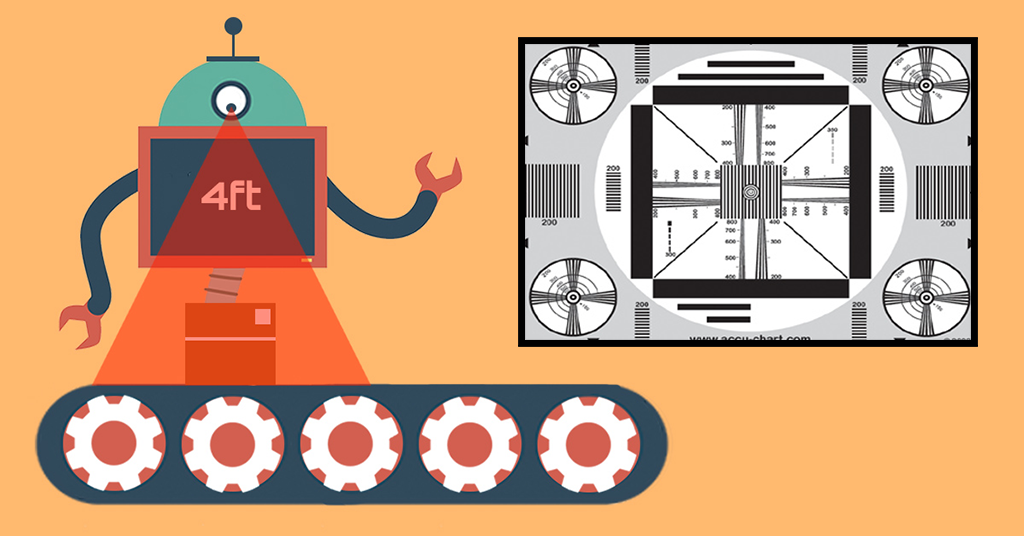
In a perfect world… well, we don’t live in a perfect world.Errors will always creep in. Fortunately, the OpenCV software library has built-in routines for correcting these errors. In this post, we take a look at 2 types of distortion and how to correct for them. Camera/Lens Distortion Cameras and lenses have intrinsic distortion. Usually, […]
14
Jun
Jun
A computer vision project we’re working on has the goal of measuring objects in a 17-foot wide window with the camera mounted only 11 feet away. Using the Raspberry Pi V2 camera (Sony IMX219 sensor) with a horizontal field of view of 62.2 degrees isn’t wide enough – seeing only about 12.5 feet wide. Typically […]

01
Mar
Mar
We’re developing a custom computer vision client application to measure the square footage of product as it moves along the production line. The Intel camera produces a 3D point cloud of objects in its field of view which can be used to calculate distance, shape, and size. Intel provides an SDK for their camera but […]